



 본사·시설 견학
본사·시설 견학
 자재 조달
자재 조달



















 재무 및 실적
재무 및 실적
 주식·사채 정보
주식·사채 정보
본사·시설 견학
자재 조달
재무 및 실적
주식·사채 정보
2023년 1월 31일
생산 현장에서는, 3K 직장의 경원이나 저출산에 의한 인손 부족이 진행되는 가운데, 한층 더 생산성이나 경쟁력의 향상을 향해 산업용 로봇의 활용이 진행되고 있습니다. 그러나 모든 생산 현장에서 산업용 로봇의 활용이 진행되고 있는 것은 아닙니다. 예를 들어, 높은 스킬을 가진 숙련 기술자가 지탱하는 공정 등에서는 로봇 도입에 대한 기대에 반하여 로봇화는 진행되고 있지 않습니다. 당사는 이러한 로봇 활용이 곤란한 공정으로의 로봇화에도 도전하고 있습니다.
이번에 수지나 금속면의 연마 공정에 있어서의 로봇화로서 실연 교시의 대처를 소개합니다.

연마 작업을 로봇화하기 위해서는, “현장에 연마 작업을 숙지한 뒤, 로봇도 취급할 수 있는 사람은 좀처럼 없다”, “누름 가감도 포함한 로봇 티칭은 어렵고, 매우 시간이 걸린다”라고 하는 과제가 있어, 일부 로봇화를 진행하고 있는 가공 메이커는 있지만, 교시에 시간이 많다. 이러한 과제를 해소하고 로봇의 도입 장벽을 줄이기 위해 직관적으로 조작할 수 있어 움직임과 동시에 힘 가감도 가르칠 수 있는 실연 교시 패키지 MOTOMAN-Craft를 개발하여 2022년 11월에 제품화했습니다.
이 개발은 연마 용도에 대한 로봇화에 대한 도전이며 로봇 업계에서 최첨단 노력입니다.
특히, 교시 장치는 숙련된 기술자의 움직임과 힘 가감을 충실히 재현할 수 있는 전례없는 연마 작업의 자동화를 지원하는 교시 도구입니다.
개발 기종 실연 교시 패키지 MOTOMAN-Craft의 시스템 구성을 그림 1에 나타냅니다.
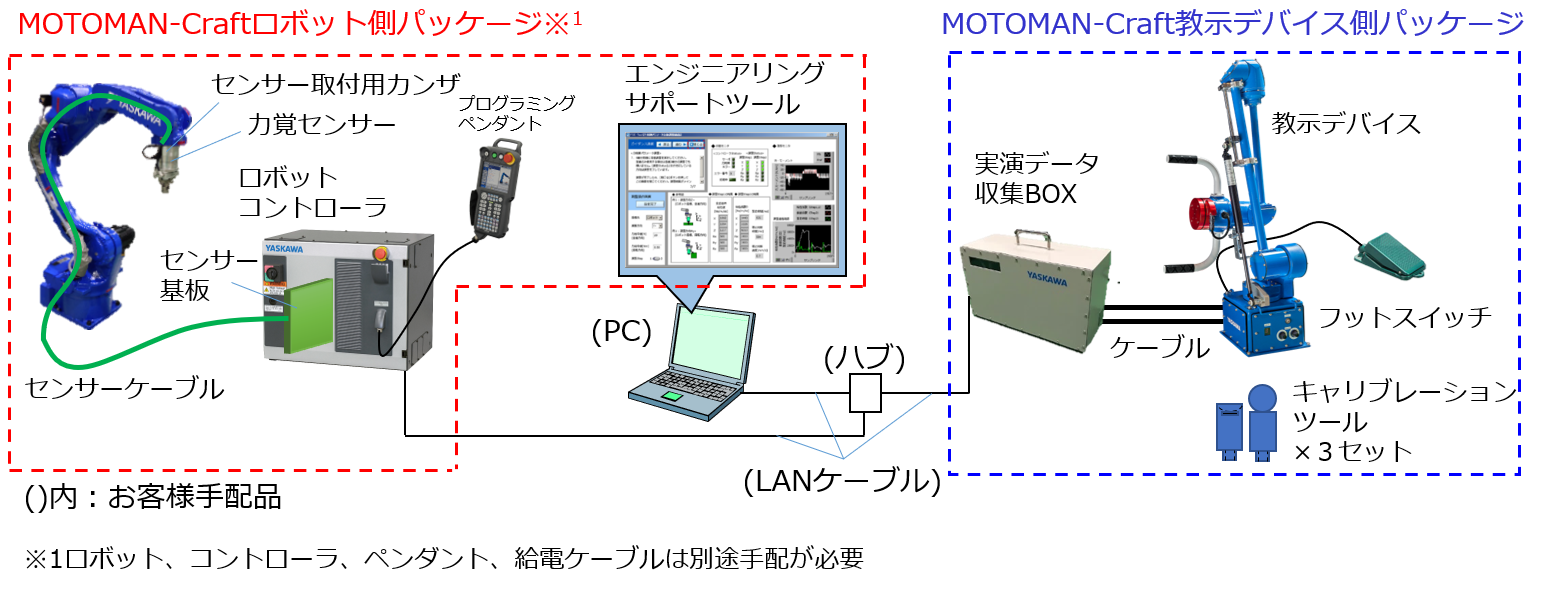 그림 1 MOTOMAN-Craft 시스템 구성
그림 1 MOTOMAN-Craft 시스템 구성

그림 2 교시 장치의 작동 방식

그림 3 교시 디바이스 운반 자세
전용 교시 기기로 작업자가 작업을 시연하고 로봇이 작동할 수 있는 프로그램으로 변환합니다. 반복 학습 제어에 의해 교시 디바이스로 조작했을 때의 움직임과 힘 가감을 로봇은 충실하게 재현할 수 있습니다. 교시 장치는 여러 로봇에 사용할 수 있습니다※2각 로봇 근처에 설치하여 각 작업 품종에 맞는 작업을 각 로봇에 가르치고 돌림으로써 조작자와 동일한 품질의 작업이 가능한 로봇을 단기간에 여러 개 시작할 수 있습니다.
※2 적용하는 로봇 컨트롤러에는 실연 교시 소프트웨어가 로드되어 있어야 합니다.
연마 작업은 아직도 손에 의지하고 있는 공정이며, 작업의 곡면 형상에 맞춘 3차원적인 궤도와 힘 가감을 로봇에게 가르치는 것이 어렵습니다. 그래서, 조작자의 움직임과 힘 가감을 센싱하고, 그 동작을 로봇으로 재현하는 기능을 개발했습니다.
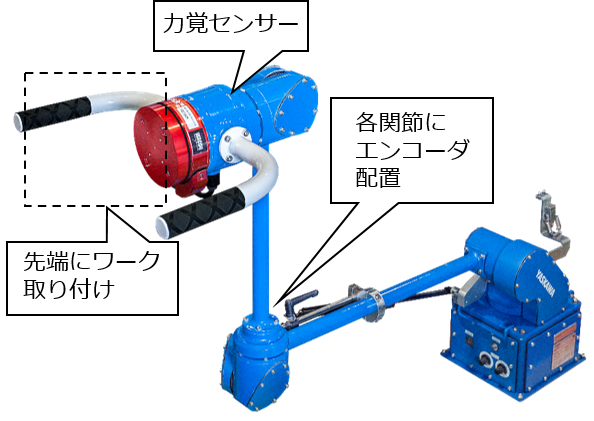 그림 4 교시 기기
그림 4 교시 기기
이전부터 사람의 움직임을 추적하는 기술로는 광학 및 자기식과 같은 모션 캡처가 있습니다. 또, 암형의 3차원 측정기도 존재합니다. 그러나, 연마 작업에 적용하기 위해서는, 「주변 장치가 있어 계측기가 둘 수 있는 장소가 한정되어 있다(복수대의 카메라를 배치할 수 있는 스페이스는 없다)」, 「연마기에 밀어 넣기 때문에 내진동성이 필요」, 「분진이 날리는 환경이기 때문에, 방진성이 필요」라고 하는 조건을 만족할 필요가 있습니다. 이러한 조건을 만족시키기 위해 제한된 공간에서 계측할 수 있는 암형으로 하고, 그림 4와 같이 교시 디바이스의 각 관절에는 엔코더, 첨단부에는 6축 힘각 센서를 배치했습니다. 또, 현장 환경을 상정한 진동 시험, 방진 시험으로
문제가 없는지 확인했습니다. 연마 작업을 견디는 전용 교시 디바이스로 작업자의 동작과 워크를 눌렀을 때의 힘 가감을 일정 주기로 센싱할 수 있습니다. 워크를 교시 디바이스의 선단에 설치한 상태에서도 연마 작업자의 평상시의 작업에 가까운 조작성을 실현했습니다.
교시 장치로 감지한 움직임을 충실히 로봇으로 재현하기 위해서는 가르치는 장치와 로봇과 연마기의 위치 관계를 정확하게 구해야 합니다. 이것을 교정이라고합니다. 보통, 캘리브레이션 작업에서는, 첨단이 날카로운 툴을 사용해, 프로그래밍 펜던트를 사용해 로봇의 위치를 미정정하면서 육안으로 툴 첨단끼리를 맞추는 것으로 실시되고 있었습니다. 그 경우 정렬에 시간이 걸리는 로봇의 숙련도에 따라 편차가 있다는 과제가 있었습니다. 이번에는 캘리브레이션 툴을 실연 교시 패키지에 포함시켜 누구나 쉽게 캘리브레이션할 수 있도록 했습니다. 캘리브레이션 툴은 그림 5와 같이 한쪽이 구체, 다른 쪽이 둥글게 뾰족한 부분에 자석이 붙은 툴이 되어 있습니다. 이러한 팁을 맞추면 고유하게 위치가 결정됩니다. 교시 장치 측과 로봇 측에서 공작물과 캘리브레이션 툴의 위치 관계가 동일하도록 엔드 이펙터에 부착합니다 (그림 6). 순서대로 교시 디바이스와 로봇의 캘리브레이션 툴끼리를 붙이는, 교시 디바이스로 연마기의 휠부에 맞추어 계측하는 것으로, 로봇에 대한 교시 디바이스와 연마기의 위치 관계를 정확하게 구해 둘 수 있습니다.

그림 5 교정 도구
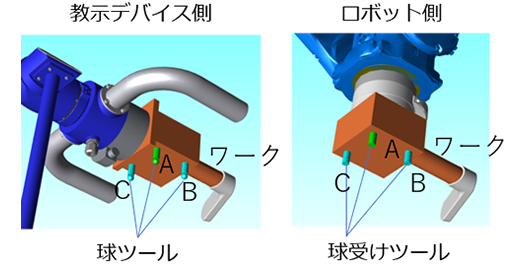
그림 6 교정 도구 설치 예
실연한 데이터를 바탕으로 작성한 프로그램을 그대로 재생해도, 배치의 미소한 위치 오차나 로봇의 힘 제어의 응답 지연 등의 요인에 의해, 조작자 실연시와 로봇 재생시에 힘 가감에 미세한 오차가 생깁니다. 그 경우에 반복 학습 제어에서는 그림 7과 같이 작업 1회마다 힘 오차를 감소시키기 위한 수정량을 위치 지령에 가산하고 그것을 반복 실행시킴으로써 로봇의 힘 가감을 실연시에 접근할 수 있습니다.
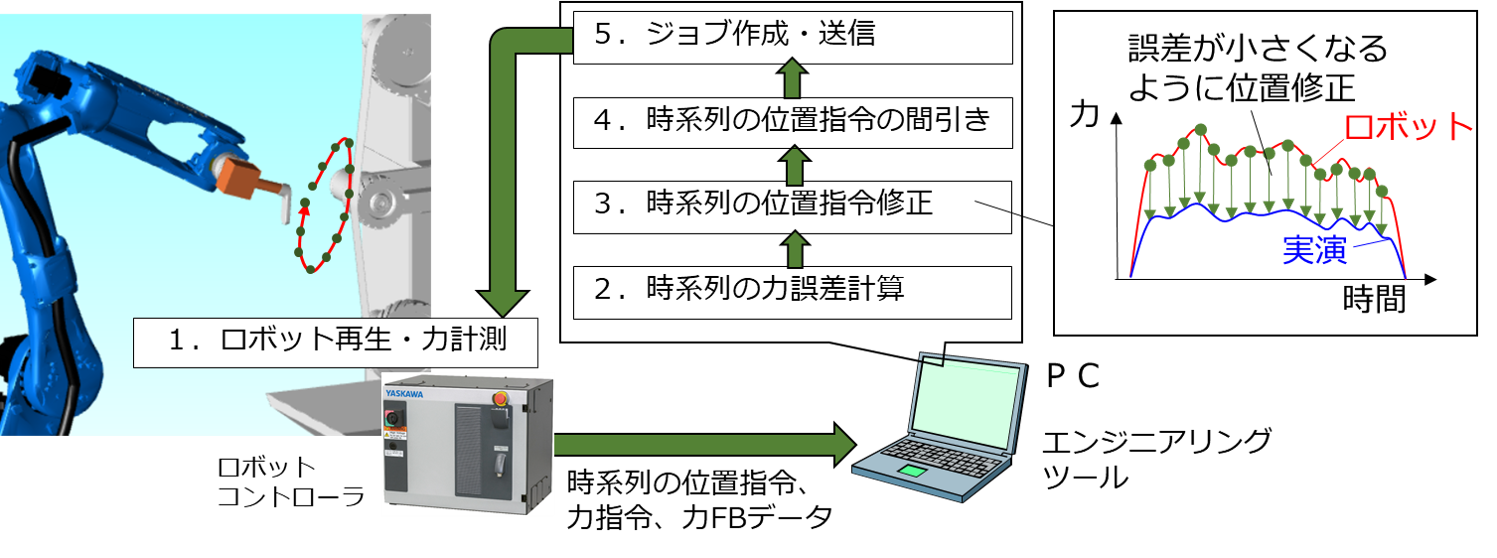 그림 7 반복 학습 제어
그림 7 반복 학습 제어
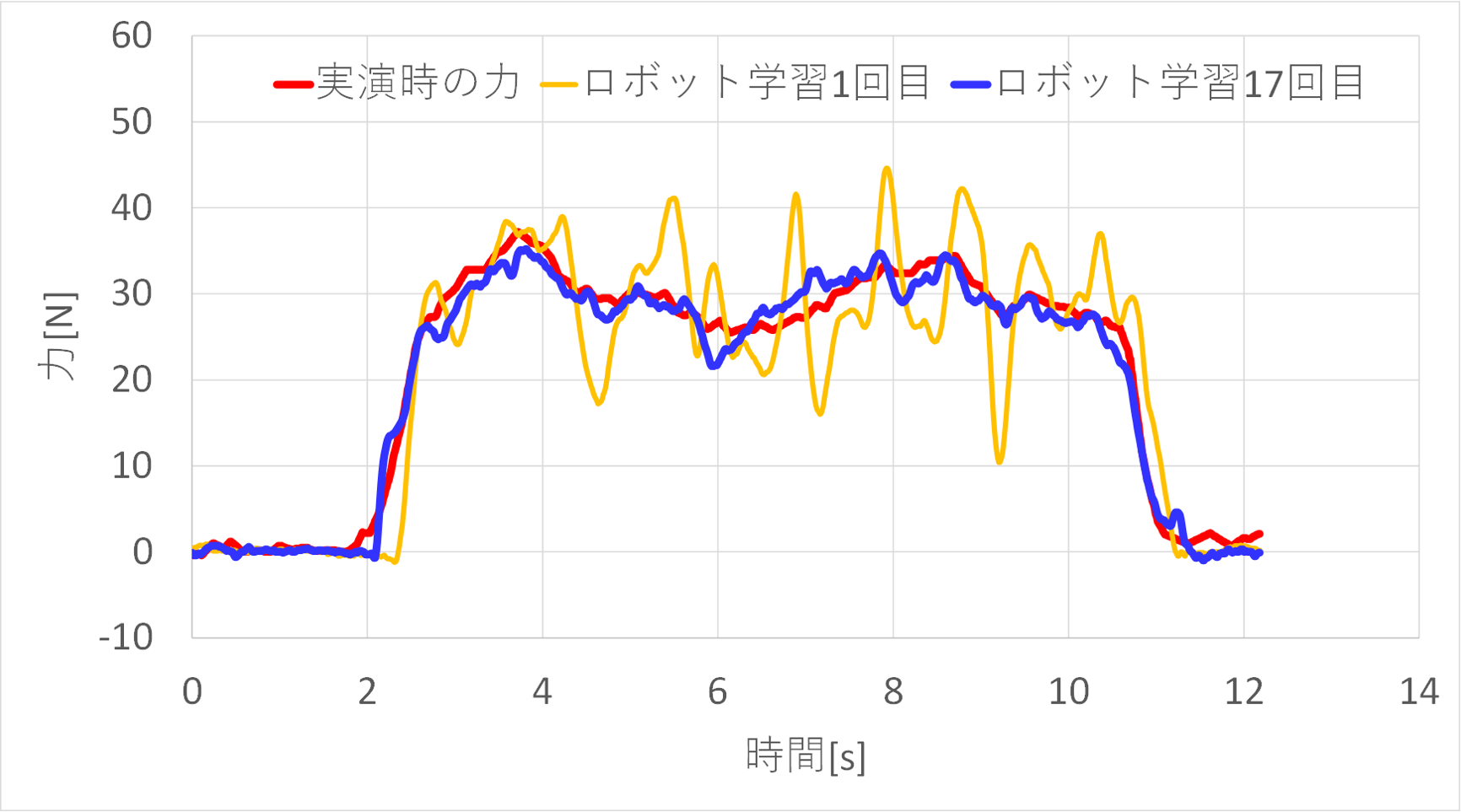 그림 8 힘의 반복 학습 예
그림 8 힘의 반복 학습 예
조작자가 학습의 종료 조건으로서 힘의 허용오차를 지정하고 학습 실행하면 로봇 자신이 자동으로 작업을 반복하고 그림 8과 같이 힘 가감을 조정해 줍니다. 생산 가동시에는, 학습 완료하고 완성된 프로그램을 사용하는 것으로 숙련 기술자의 연마 작업을 충실히 재현할 수 있습니다. 또한 숙련된 기술자의 스킬을 디지털화하여 남길 수 있으며, 기능의 보존, 전승, 표준화가 가능합니다.
시스템 인티그레이터와 고객에게 사용해 주신 피드백을 기능에 활용하여 로봇 도입 장벽을 더욱 줄일 수 있도록 앞으로도 개선에 노력하겠습니다. 또, 연마 작업 이외에의 전개도 검토하고 있으므로, 요구가 있으면 꼭 알려 주세요.
회사는 계속해서 생산 현장에서의 추가 생산성과 경쟁력 향상을 위한 산업용 로봇의 활용을 위해 노력하고 있습니다.
![]()









